人間や生物の構造・機能を工学的な視点で解析し、ロボットに活かす学問をバイオロボティクスといいます。ロボットの目的は、人間社会を支え、私たちの生活を豊かにすることです。ロボット技術を活用し、災害現場、バイオ、医療分野への応用を目指したシステム開発に挑戦します。
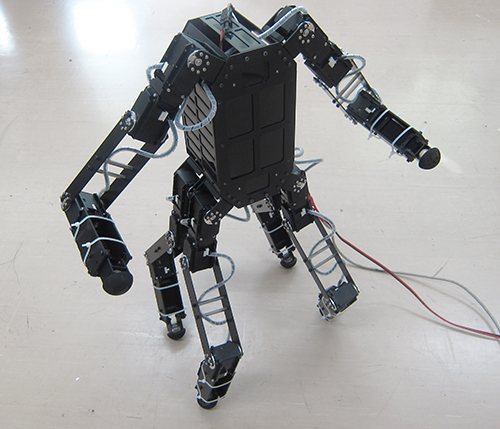
6脚歩行、直立歩行、2腕作業等が可能な6脚作業移動ロボットを開発し、 レスキュー活動や施設の点検作業への応用を目指します。
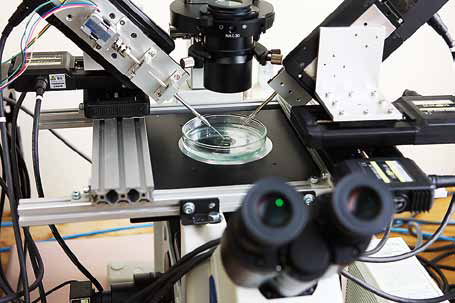
細胞等の微小物体の把持・移動・回転が可能なマイクロハンドと そのインタフェースを開発しています。
本研究室では、曲面上のあらゆる方向に動力を伝達できる全方向駆動歯車を応用したロボットシステムをはじめとして、新しい機能を持つ装置を応用した高度な次世代ロボットシステムを構築することを目指しています。 何度も試作を繰り返しながら有益なロボットシステムを構築する過程で、人格的にも成長できる環境が整えられています。
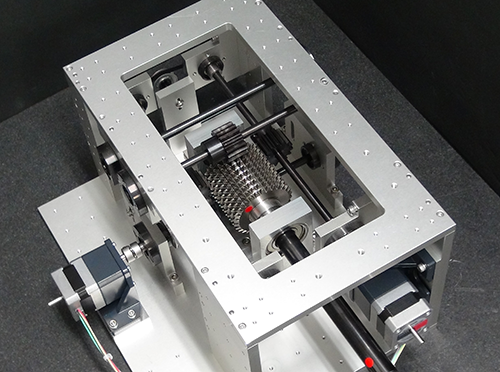
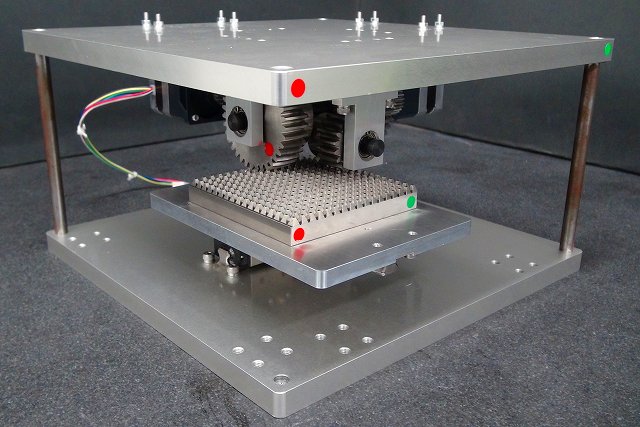
本研究室で新規に開発された全方向駆動歯車は、その表面に沿った任意の方向に動力を伝達でき、ロボットシステムの小型化・軽量化に貢献できるものです。
テレロボティクスとはロボットを遠隔操作するための学問領域です。遠隔操作では,ヒューマンインタフェースに関連するVR技術も重要な役割を果たします。独自の機構設計をベースに宇宙ロボット、ウェアラブルロボット、バイオロギング用ロボット、さくらんぼ自動収穫ロボットなどの研究を行っています。
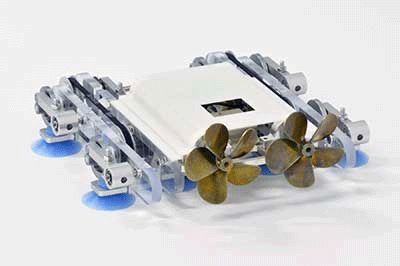
マッコウクジラがダイオウイカを捕食しているシーンを撮影するために、海洋動物学者と協力して、水中ロボットを開発しています。
県内さくらんぼ農家の要望に応え、さくらんぼを自動で収穫できるロボットを開発中です。熟練者が持つ「こつ」と「スピード」をロボット上に実現することは大きなチャレンジです。
本研究室では、生体由来素材から細胞培養足場材料を開発して、ヒトiPS細胞の心筋細胞への分化促進および再生心筋組織の構築を目指している。そのために細胞と足場との相互作用の探求、独創的な実験装置の開発などを行い、再生医療工学という魅力あふれる分野に機械工学という視点から展開して行く。
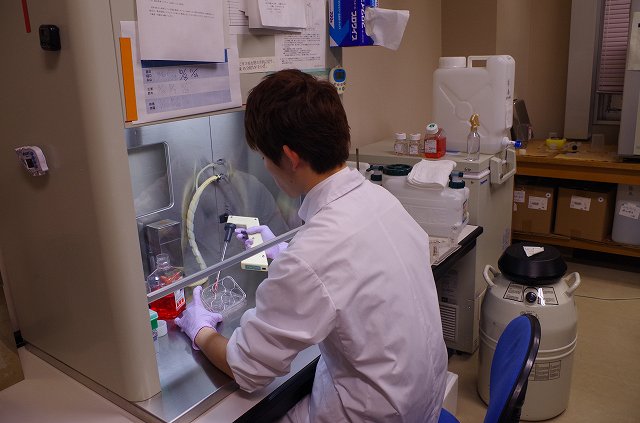
細胞培養の培地交換は本研究室の日課です。コンタミネーションが起こらないよう注意深く操作を行っています。
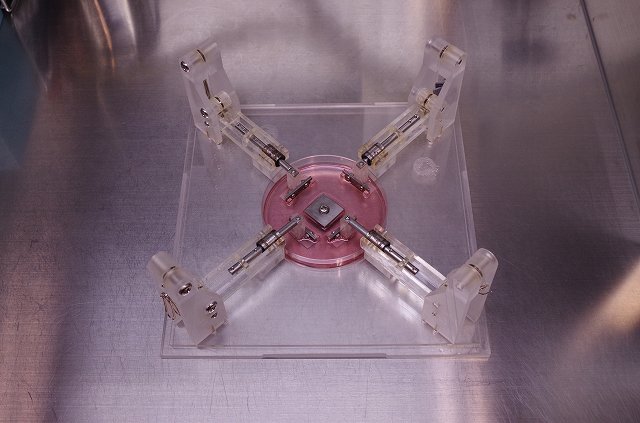
足場素材の力学特性が幹細胞の分化に与える影響についての研究を進めるため、開発した応力印加により足場素材の弾性を調整できる培養装置。
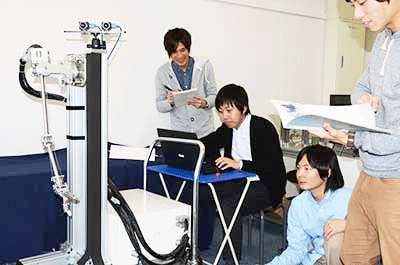
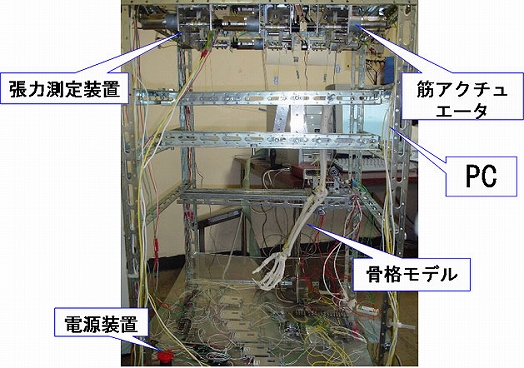
移動ロボットを中心に、ロボットのメカニズムと運動制御に興味を持って研究しています。これまで工場を中心に活躍してきた硬いロボットがもっと柔らかく安価で安全になるための方法として、弾性腱で駆動するマリオネット型ロボットを試作しました。位置決めの高い精度や高速動作がなくても役に立つ作業ができないかと模索しています。

ムサシやコメリ(山形県内のホームセンターです)で見つけてきた材料でロボットアームを作りました。関節にギアがないので天然のダイナミクスがそのまま現れます。人間のように作業させる制御技術を研究します。

外出中に地道にコツコツ除雪する。雪用のお掃除ロボットを目指した研究です。今後はもっとダイナミックな方法にも挑戦します。
医学物理と医用情報処理についての研究教育に取り組んでいます.数学,物理,コンピューターを駆使して,医学・生物学の画像に関わる問題に挑戦しています.生体の内部を非破壊的に観察するための新しい物理原理に基づく画像化手法(図1)を開発したり、医師を支援するための人工知能によるコンピューター診断方法(図2)を開発しています。
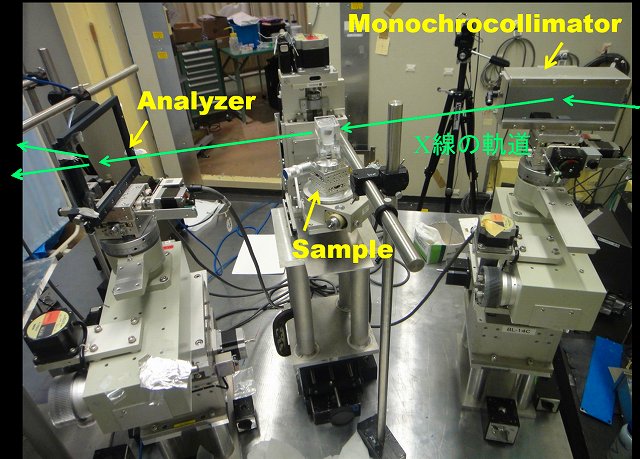
高エネルギー加速器研究機構フォトンファクトリ―に構築した位相コントラストCTイメージング装置
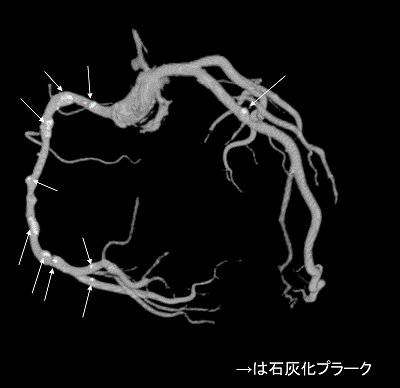
胸部X線CT画像からコンピューターにより自動的に抽出された冠動脈および石灰化プラーク
本研究室のテーマは、システム制御工学分野と、臨床生体力学分野の二つがあります。 生体力学では、医学領域において、臨床上の問題が力学的問題に密接に関係するものも多いので、機械工学分野の知識や実験手法を医学分野に 応用する研究を行つています。
ヒト上肢の運動は多くの筋肉活動の協調により行われている。 中でも回内回外運動は霊長類に特有な上肢運動であり、複雑な筋肉活動の結果として実現される。 本研究では、筋電図より示唆された結果に基づき回内回外運動をシミュレータで実現することにより促通・抑制の筋肉活動を証明するとともに、神経結合が切断された際の運動障害を解明する。
本研究室では,歩行補助や立ち上がり補助など生活に欠かせない動作の支援を行う装置の開発を行っています。1入力で装置が人体脚部を追従して動くよう,シミュレーションをしながら設計しています。
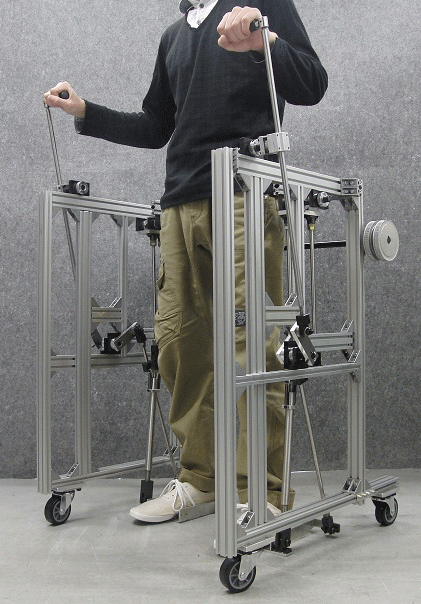

腕部の杖を突く動作を入力として脚部の歩行動作を支援します。
生命活動を支えるタンパク質群は“分子機械”と呼ばれ,ナノメートルスケールで構造部品、リアクター、ポンプ、モーターとして働きます。ここでは、モータータンパク質を用いて生物運動の“素”を再構成し顕微鏡下で性能試験を行っています。様々な分子機械を組み合わせる手法により、生物機能の発現過程を明らかにしていきます。
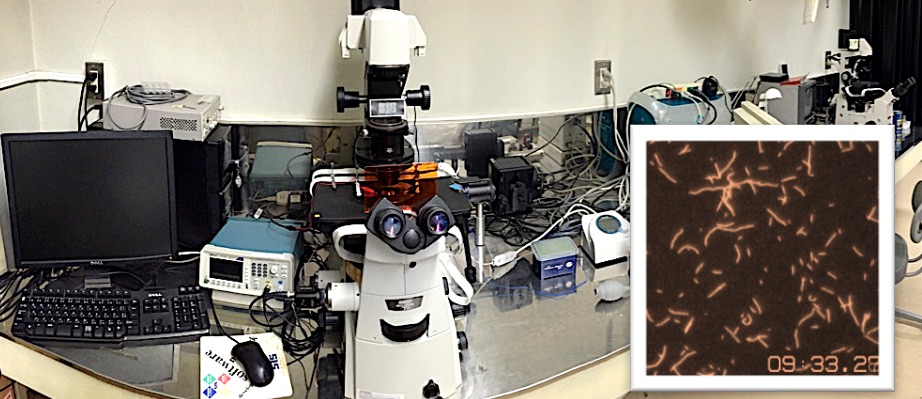
ナノメートルスケールでの現象を捉えます。
滑らかでむだのない動きをロボットで実現するには制御が重要となります. システムが望ましい挙動を示すためにはどのような制御が有効か,その問題に 対する数学的な理論を研究しています. また,制御理論のロボットへの応用を考え,3次元コンピュータグラフィクスを 用いたシミュレータを開発して制御方法を検討しています.

3つの関節を持つロボットアームのシミュレータを開発し、 アームの動作解析と関節角の制御方法を考えています。
光干渉断層計(OCT,optical coherence tomography)は、弱い近赤外光を用いた人体にやさしい高解像度な画像計測で、山形大学発祥の技術です。当研究室では、OCT技術をベースに新しい光干渉計の開発、GPUによる高速画像処理プログラムの研究を行っています。
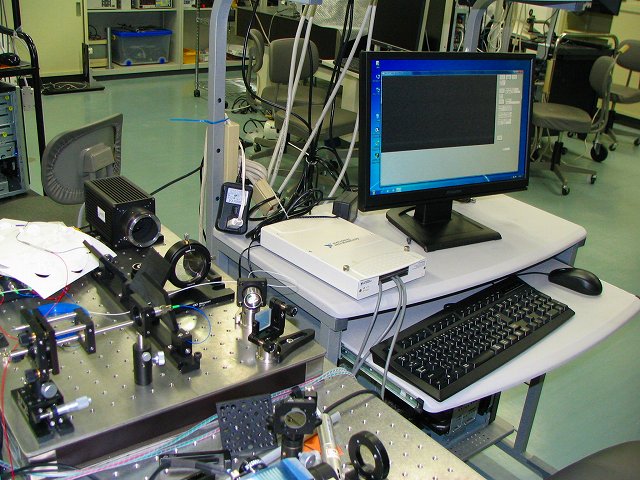
ハードウエア、ソフトウエアの両面からOCTシステムの開発を行っています。
回転機械をはじめとする各種産業機械への制御工学(ロバスト制御,非線形制御)の応用と、制御対象の解析に必要な技術(機械力学、振動工学、電磁気学など)を応用した医療機器開発に取り組んでいます。また、雪面移動用ドリル推進機構や新型3Dプリンタの開発にも取り組んでいます。
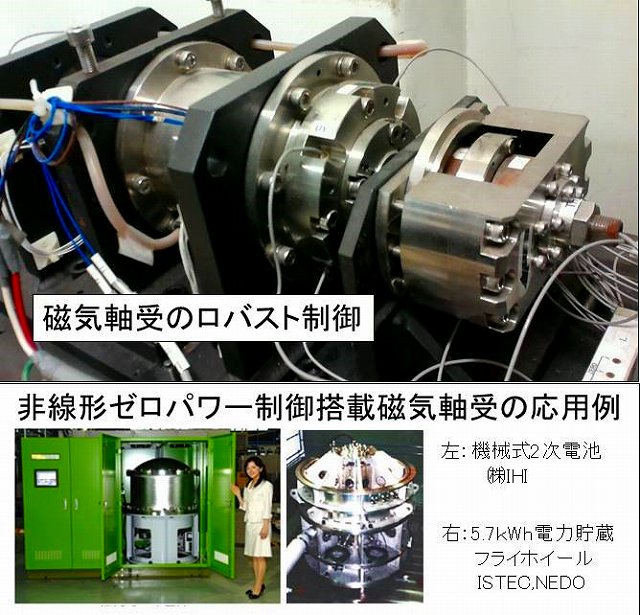
磁気軸受は宇宙空間などの極限環境で使われる特殊な軸受です。その性能を向上するための制御理論を研究しています。

雪が降ったらドリルの実験です。雪深い米沢ならではの研究テーマです。
柔軟性の高いアクチュエータを開発、制御することで周囲の人間に優しいロボットの開発を目指しています。ただ柔らかいだけでなく、作業に必要な出力や動きの正確さをロボットに与えるために制御面にも力を入れています。
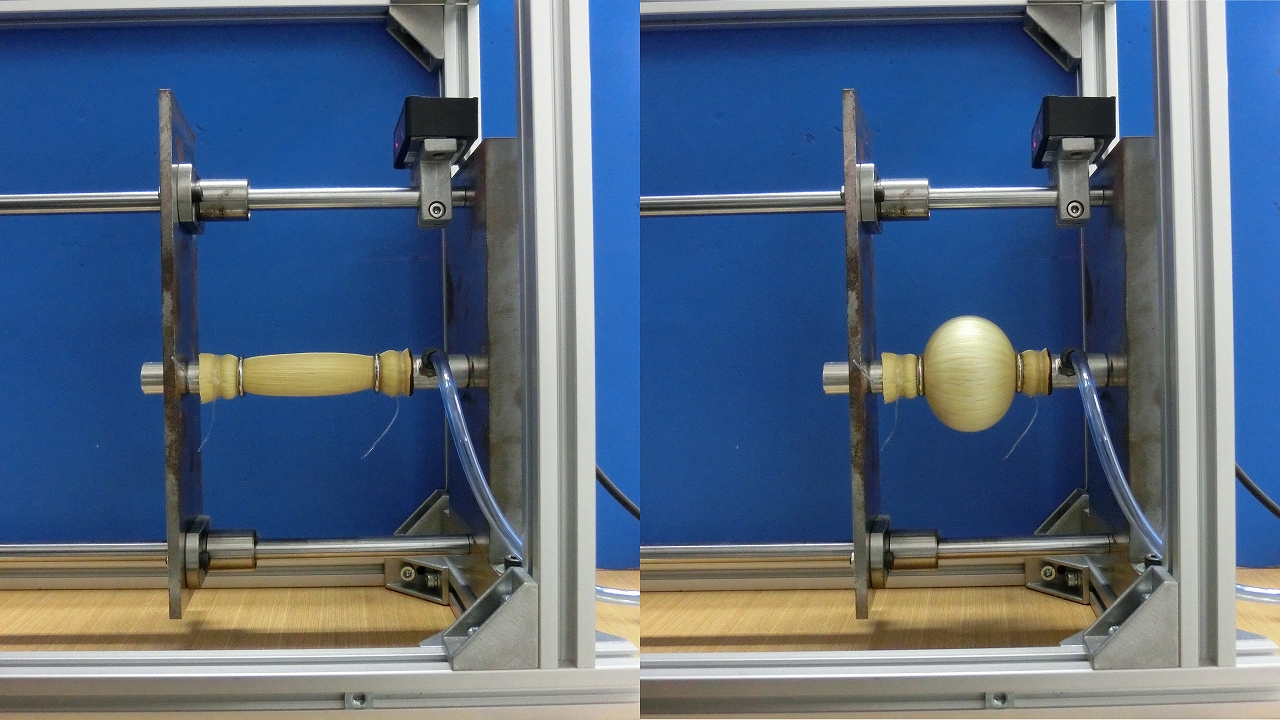
ゴムと炭素繊維でできたチューブに空気をいれることで、生物の筋肉のように収縮します。 ゴムの厚みやチューブの太さを変えることで特性を調整でき、繊維の方向によっても動きが変わります。
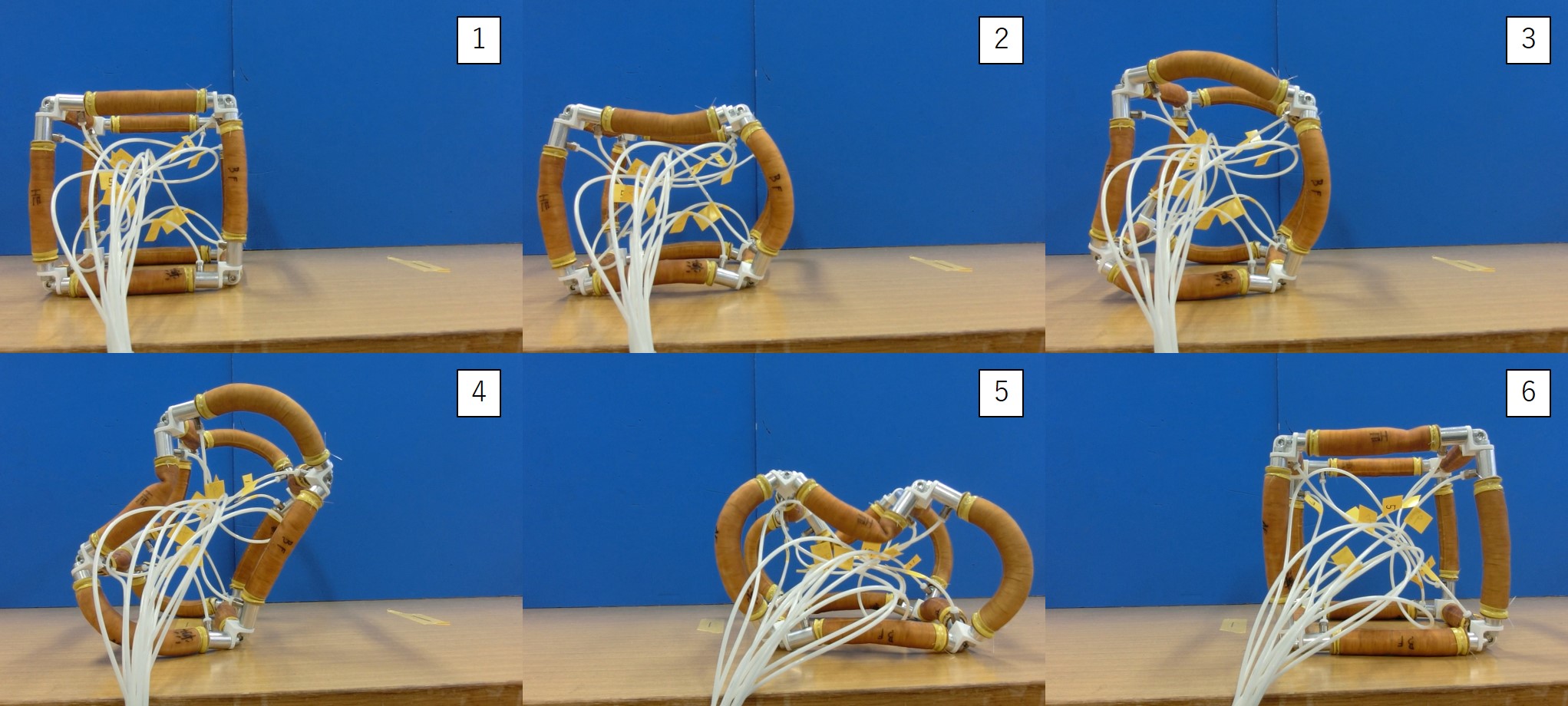
空気圧によって湾曲する人工筋肉でロボットを構成することで、芯まで柔らかいロボットを目指しています。試作したロボットは自身の形を変形させ、転がるように移動します。
2025.4